![]()

![]()
| プロジェクト・最強の観望会用望遠鏡を目指して |
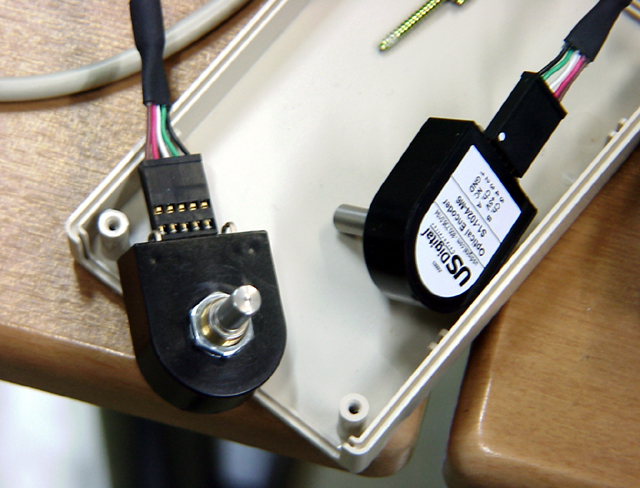
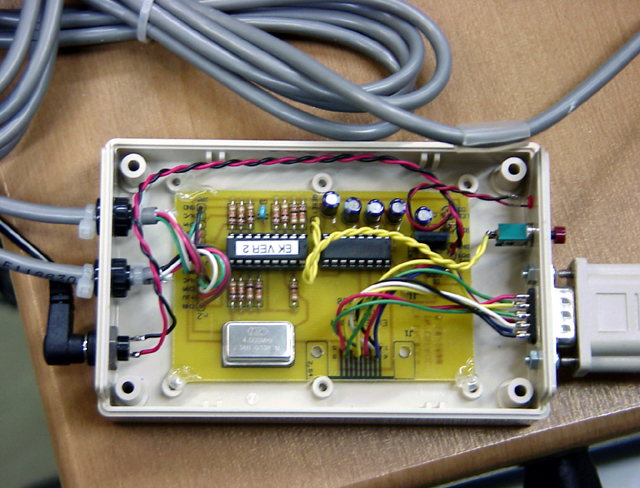
| 観望会での望遠鏡の所要条件を考えてみましょう。 1.大きければ大きいほどよい。 2.軽くて持ち運びやすく、分解できて小さくまとまる。 3.だれでも簡単に対象天体を導入できる ってことは、ドブソニアンで自動導入の望遠鏡が基本形となります。 ドブソニアンを作るのはさほど困難ではありません。難しいのはどうやって制御するか?です。 経緯台を自動導入、自動追尾するのはちょっとやっかいです。 スカイセンサーPCを使うのも一つの手段ですが、ここはアマチュア的発想で一発やっちゃおうと思います。 観望会でよく見る光景は、ちっちゃい子が望遠鏡にぶらさがって動かしちゃった・・・ってことでしょう。 オープンループ制御ならこれは致命的なできごととなります。 てなわけで、基本形は常に望遠鏡の姿勢をモニターしながら追尾するクローズドループ制御とすることとしました。 手始めにとりあえずはエンコーダーインターフェースを製作して望遠鏡がどこを向いているか表示するシステムを作りました。 どうせやるならゲーム感覚でPC画面に星図とレチクルを表示しちゃえと作ったのがこれ。 結構精度が高く、画面のイメージ通りにアイピースに入っています。 「この丸の中にこの天体を入れてみて。」とやらせてみると、一度も望遠鏡をさわったことがない方でも簡単に視野にいれていました。 |
 |
 |
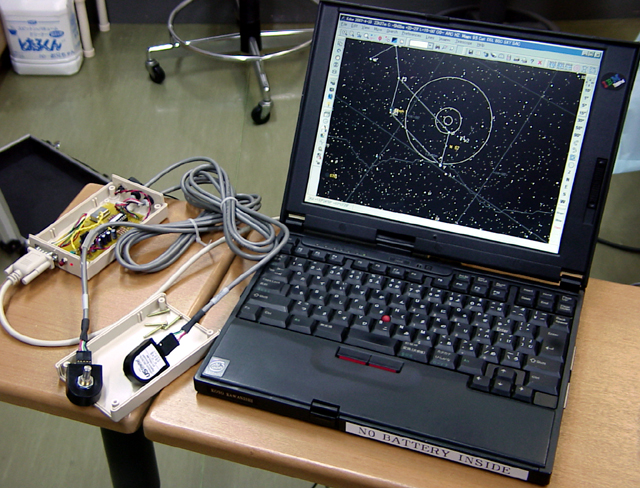 |
| ところが問題発生。 ケーブルがもつれたり、PCの画面と望遠鏡の向きがあわず、行ったり来たりでなかなかレチクルがあわせられないことも起こりました。 そいじゃ全部載っけちゃえ・・・ってことで、架台に設けたサイドテーブルにPCを置いて解決しました。 エンコーダーは不意の外力から保護するため、マグネットカプラーで簡単に脱着できます。 DC12V直結でもよかったのですが、闇夜の極性逆接続を回避するため、一度インバーターで昇圧し、トランスで電源を取っています。無駄が多いですが、安全第一! |
 |
 |
 |
| さらなる電動化にむけて製作中! |
![]()